Research Question: How can an artificial muscle be designed using foldable robotics techniques that can produce the same biomechanical properties as that involved in ankle motion of land based vertebrates?
The project goal is to focus on the calf muscle, or gastrocnemius, as the muscle to replicate. This muscle is responsible for controlling the angle of the heel. This can be seen below in the Calf Muscle Diagram.
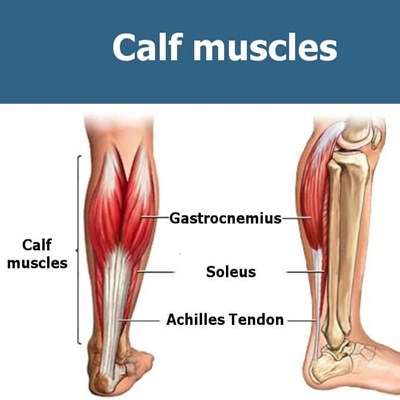
Calf Muscle Diagram[1]
As such, the device must create linear motion with the ability to push and pull. It must also be a foldable roboitcs system operated by servos.
References
[1] https://www.shape.com/fitness/workouts/leg-workouts/calf-workout-exercises-mobility